Điều khiển tích phân tỷ lệ mờ FPI
Hiện vẫn tồn tại nhiều ý kiến trái chiều giữa các nhóm nghiên cứu về kỹ thuật điều khiển tích phân tỷ lệ mờ FPI (Fuzzy Proportional Integral controller). Tuy nhiên, thực tế kiểm chứng cho thấy kỹ thuật này vẫn có thể áp dụng được cho mục tiêu giảm sai số xác lập và rút ngắn thời gian tăng của đáp ứng. Nên ở Chapter này chúng ta sẽ củng đánh giá xem việc sử dụng nó liệu có hiệu quả.
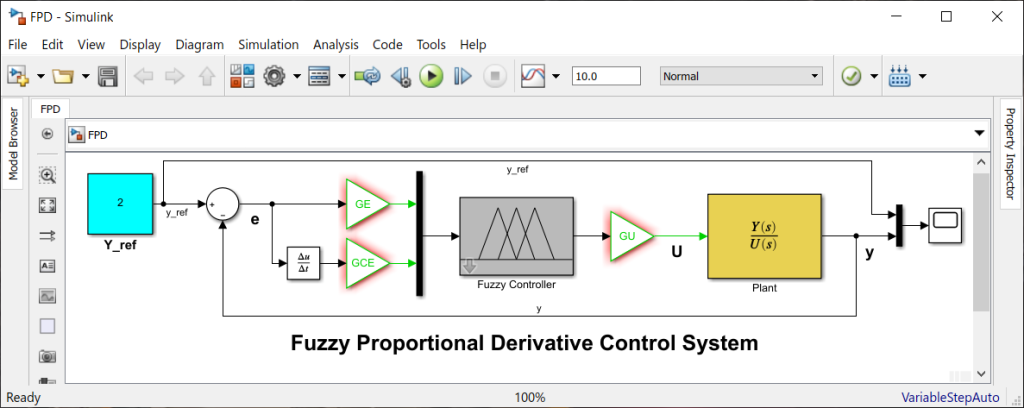
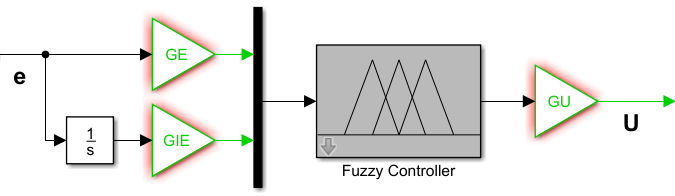
Bộ điều khiển tích phân tỷ lệ mờ FPI được xây dựng dựa trên bộ điều khiển mờ MISO cơ bản, bằng cách thêm các khâu GE, GIE và GU tương tứng tại 2 ngõ vào và ngõ ra của bộ điều khiển MISO. Đồng thời, khâu vi phân ở ngõ vào thứ hai của bộ điều khiển MISO cơ bản được thay bằng khâu tích phân. Việc chọn lựa giá trị của GE, GIE và GU cần lưu ý:
– Thỏa mãn quan hệ:
GE*GU = KP(*)
GIE/GE = 1/TI(**)
Như bộ điều khiển tích phân tỷ lệ (PI) quen thuộc, với TI là thời hằng tích phân.
– Giá trị khâu khuếch đại GE và GIE cần được chọn lựa sao cho tín hiệu e và ie đi qua 2 khâu này phải có biên độ nằm trong giới hạn hoạt động của 2 ngõ vào của bộ điều khiển mờ MISO.
Lưu ý: Trong quá trình tính thiết kế bộ điều khiển mờ FPI ta có thể thay đổi giá trị các khâu khuyếch đại được thêm vào để tinh chỉnh bộ điều khiển. Nhằm đạt được kết quả và chất lượng điều khiển tốt nhất chứ không nhất thiết phải khô cứng tuân theo biểu thức (*) và (**). Tuy nhiên, giá trị tín hiệu e và ie sau khi đi qua 2 khâu này phải có biên độ nằm trong giới hạn của bộ điều khiển.
Cải thiện bộ điều khiển mờ MISO cơ bản
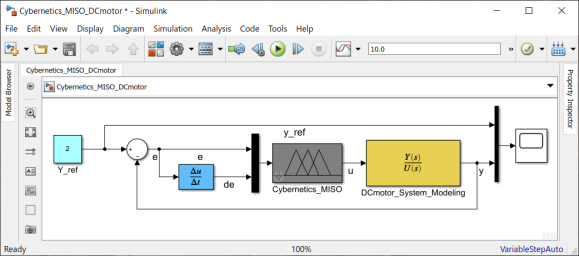
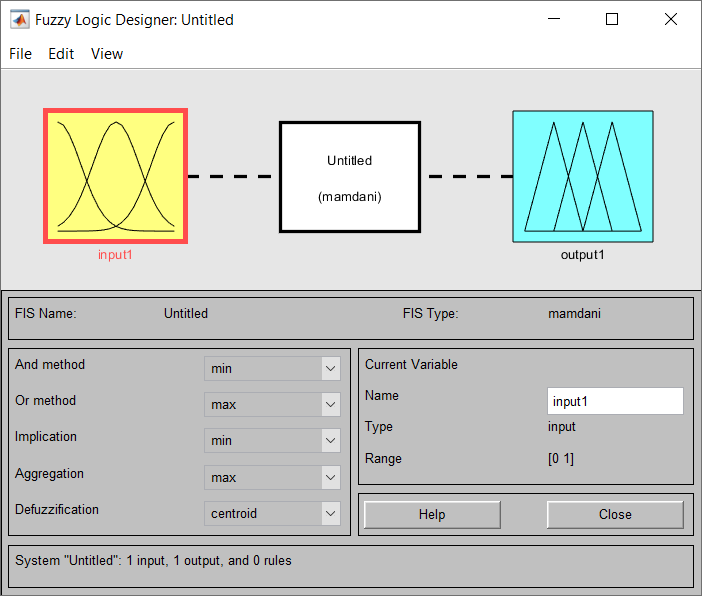
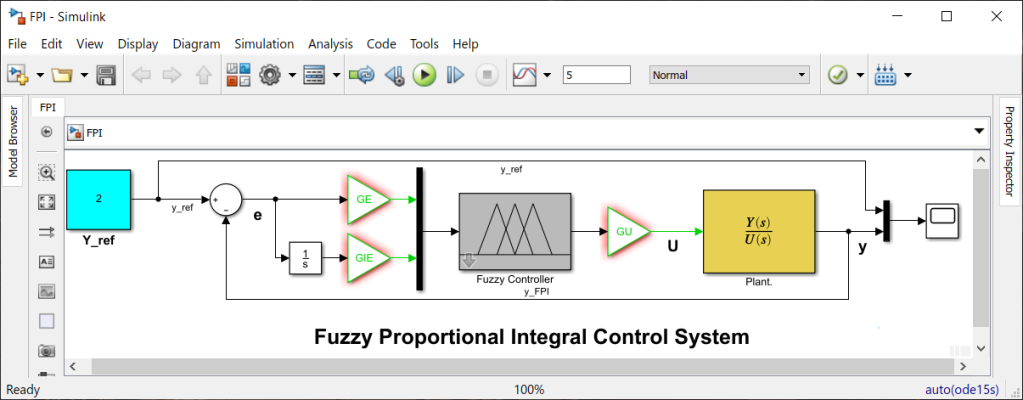
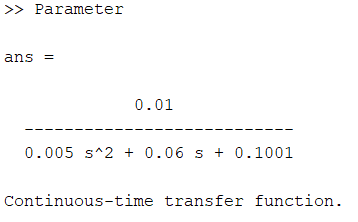
Để đánh giá hiệu quả của kỹ thuật cải tiến điều khiển mờ FPI, chúng ta kiểm chứng trên bộ điều khiển MISO đã được thiết kế ở Chapter M như sau:

Bộ điều khiển mờ FPI có được bằng cách thêm các khâu khuếch đại GE = 1, GIE=0.005 và GU = 1 tương ứng tại 2 ngõ vào và ngõ ra của bộ điều khiển MISO, đồng thời thay khâu vi phân thành khâu tích phân.
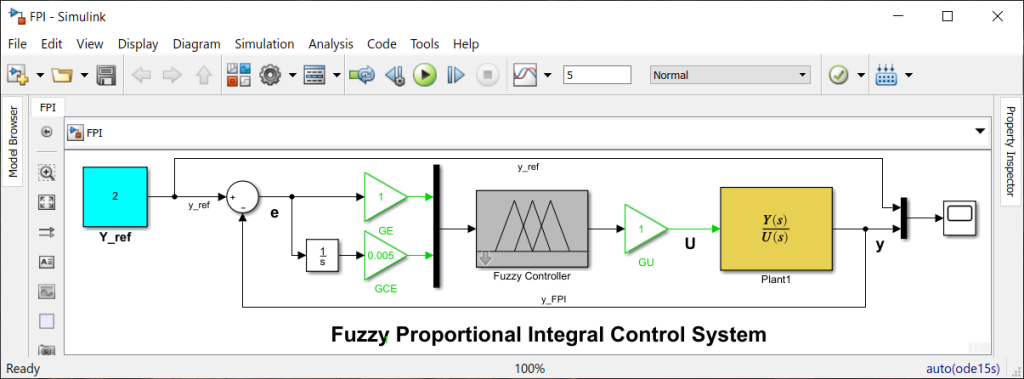
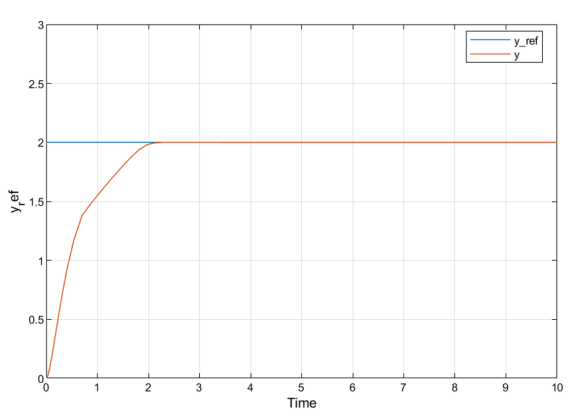
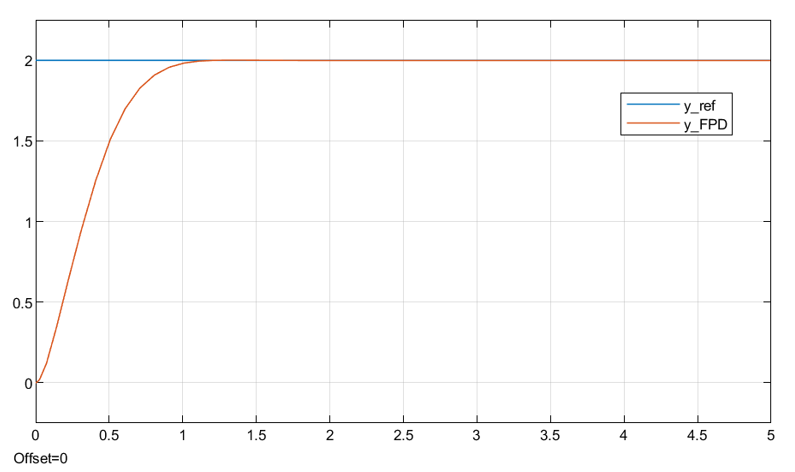
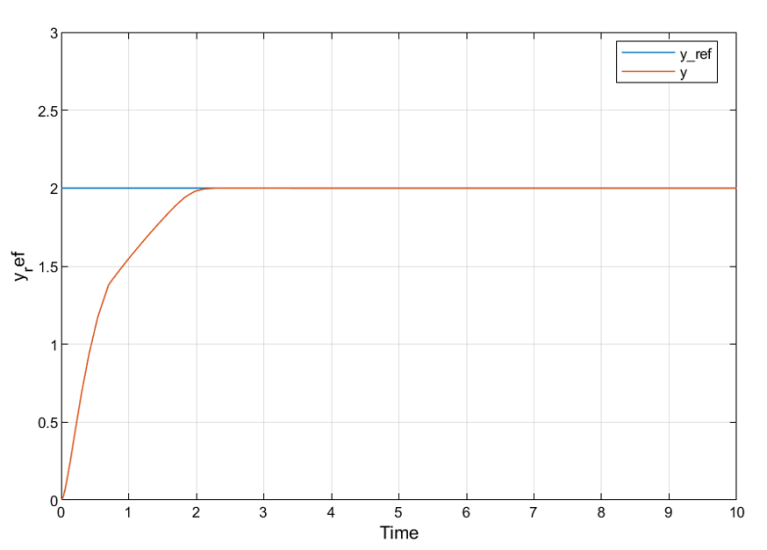
Sau đó, tiến hành mô phỏng theo sơ đồ trên ta thu được đáp ứng như sau:

So sánh kết quả trên:

Ta thấy bộ điều khiển tích phân tỷ lệ mờ FPI cho đáp ứng với thời gian tăng tốt hơn và hạn chế sai số xác lập. Kỹ thuật điều khiển FPI có thể sử dụng để cải thiện được bộ điều khiển mở MISO cơ bản. Tuy nhiên, quan sát đáp ứng ta thấy có sự xuất hiện vọt lỗ nhẹ, có thể chấp nhận được. Nhưng đây cũng điểm hạn chế của kỹ thuật cải tiến này, vì khó có thể triệt tiêu triệt để được sự vọt lố.