Điều khiển vi phân tỷ lệ mờ + tích phân
Điều khiển vi phân tỷ lệ mở + tích phân FPD+I (Fuzzy Proportiona Derivative plus Integral controller) sử dụng cả khâu vi phân và khâu tích phân như bộ điều khiển PID với tham vọng có thể hạn chế được độ vọt lò bằng khâu vì phản, rút ngắn thời gian tăng và triệt tiêu sai số xác lập băng khâu tích phản.
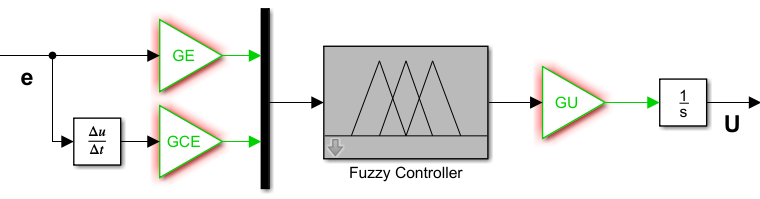
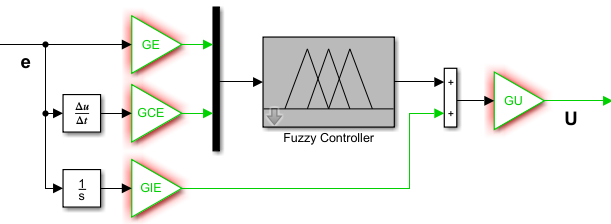
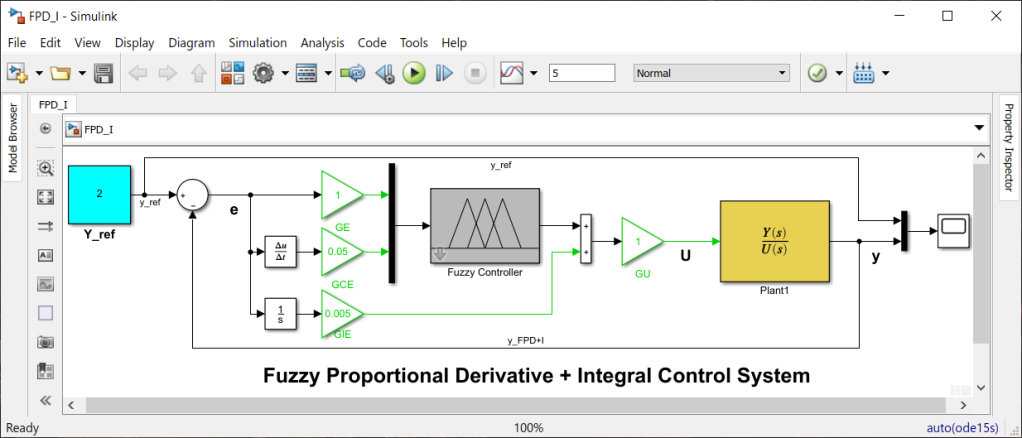
Bộ điều khiển FPD+I được xây dựng như sau:
Việc chọn lựa các khâu khuếch đại GE, GCE, GIE và GU cũng cần thoa mãn quan hệ và đảm bảo giới hạn hoạt động của ngõ vào của bộ điều khiển MISO cơ bản như các kiều cải thiện trước.
GE*GU = KP(*)
GCE/GE = TD(**)
GIE/GE = 1/TI(***)
Lưu ý: Trong quá trình tính thiết kế bộ điều khiển mờ FPD+I ta có thể thay đổi giá trị các khâu khuyếch đại được thêm vào để tinh chỉnh bộ điều khiển. Nhằm đạt được kết quả và chất lượng điều khiển tốt nhất chứ không nhất thiết phải khô cứng tuân theo biểu thức (*), (**) và (***). Tuy nhiên, giá trị tín hiệu ngõ vào sau khi đi qua các khâu này phải có biên độ nằm trong giới hạn của bộ điều khiển.
Cải thiện bộ điều khiển mờ MISO cơ bản
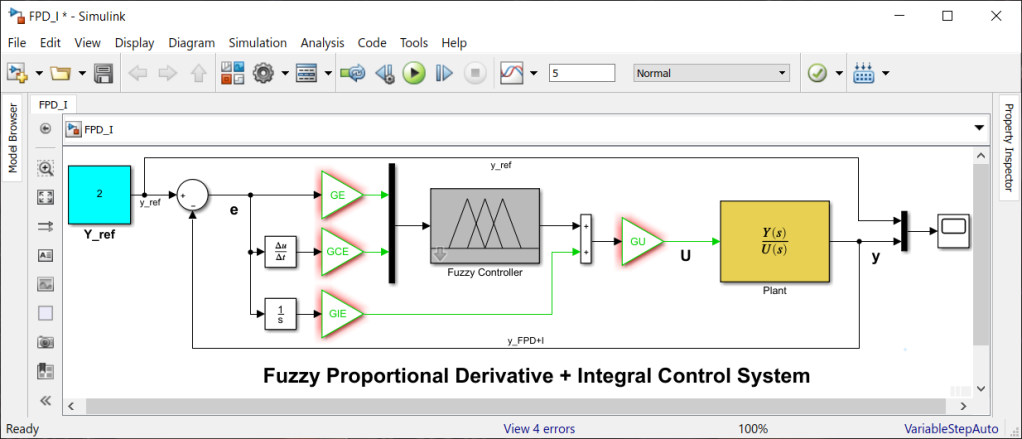
Tương tự, để đánh giá hiệu quả của kỹ thuật cải tiến điều khiển FPD+I chúng ta tiến hành kiêm chứng trên bộ điều khiển MISO đã được dựng Ở Chapter M. Đến đây ta có thấy bộ điều khiển FPD+I có đủ 3 thành phần tỷ lệ, tích phân và vi phân nên ta tiền hành tính toán để chọn lựa các khâu khuếch đại GE, GCE, GIE và GU dựa theo tham số của bộ điều khiển PID đã được thiết lập ở Chapter. Ngoài ra, ta có thể dùng phương pháp thử sai để tìm bộ thông số thích hợp cho hệ thống bằng mô hình trên Simulink.
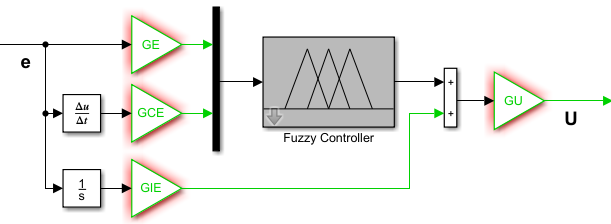
Mô hình bộ điều khiển MISO cơ bản như sau:


Sau nhiều lần kiểm chứng bằng phương pháp thử sai, ta chọn được GE = GU = 1 do bộ điều khiển mờ MISO cơ bản đã cho đáp ứng khá tốt. Các GCE = 0.05 và GIE = 0.005 để cải thiện thời gian xác lập cho hệ thống.

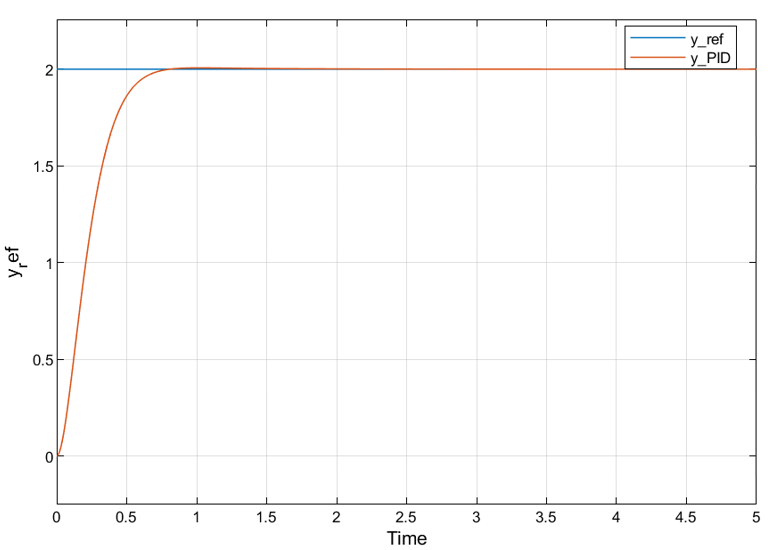
So sánh kết quả trên
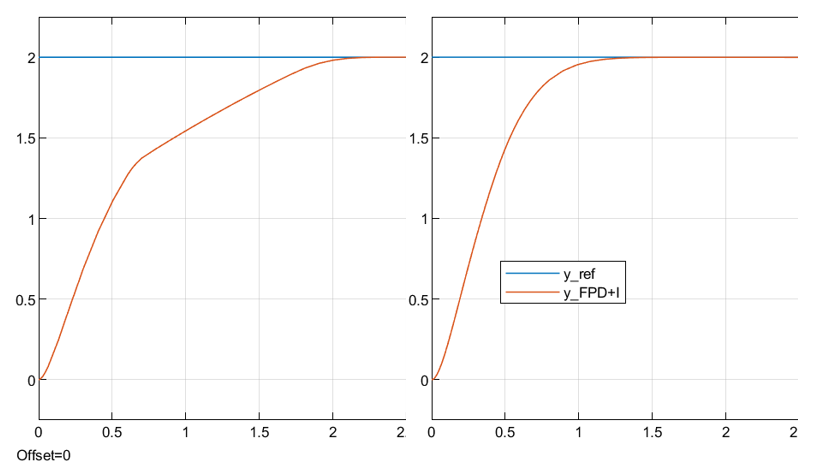
Ta thấy bộ điều khiển FPD+I cho đáp ứng rất tốt với thời gian tăng được cải thiện, sai số xác lập bị mệt tiêu và không xuất hiện vọt lố. Ngoài ra, nếu so sánh kết quả mô phỏng trên, ta thấy kỹ thuật cải thiện bằng điều khiển mờ FPD+I hoàn toàn tương đương với bộ điều khiển PID. Các kết quả mô phỏng cho phép ta khẳng định kỹ thuật điều khiển FPD+I có thể được sử dụng để cải thiện bộ điều khiển mờ MISO cơ bản với chất lượng đạt yêu cầu.