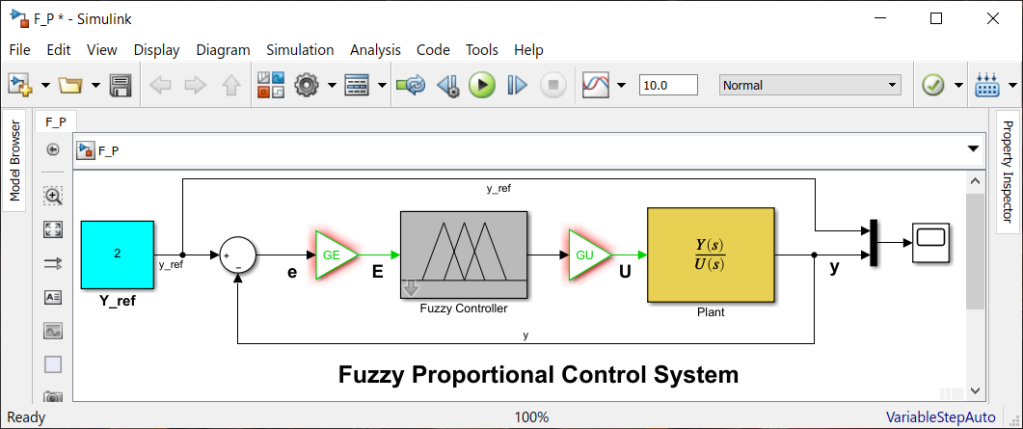
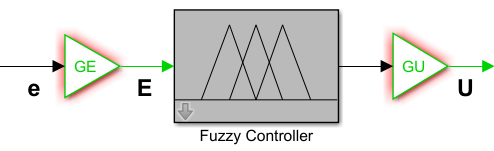
Khi bộ điều khiển mờ SISO đã thiết kế không đáp ứng được yêu cầu như tồn tại sai số xác lập lớn, thời gian quá độ lớn… Ta có thể tiến hành cải thiện bộ điều khiển bằng cách thêm 2 khẩu khuếch đại có độ lợi GE và GU, tương ứng tại ngõ vào và ngõ ra của bộ điều khiển. Việc chọn lại các giá trị của 2 khâu khuếch đại này nếu thỏa:
GE*GU = Kp(*)
Thì tương đương với khẩu tỷ lệ quen thuộc, khi đó ta được bộ điều khiển tỷ lệ mờ FP (Fuzzy Proportional controller).
Lưu ý rằng, ở giai đoạn mờ hóa ngõ vào e của bộ điều khiển mờ, giá trị vật lý của e nằm trong giới hạn [emin, emax](Xem Chapter L). Do đó, khi chọn giá trị GE cần đảm bảo sao cho khi sai biệt e đi qua khâu khuếch đại GE để thu được giá trị E phải nằm trong giới hạn này, tức phải thỏa mản:
E = e*GE thuộc [emin, emax](**)
Như vậy, việc thêm khâu GE thực chất là việc chuẩn hóa biên độ tín hiệu e về khoảng giới hạn hoạt động của ngõ vào của bộ điều khiển. Sau khi đã chọn được GE thì việc chọn GU trở nên đơn giản, chỉ là giá trị KP/GE.

Lưu ý: Trong quá trình tính thiết kế bộ điều khiển mờ FP ta có thể thay đổi giá trị các khâu khuyếch đại được thêm vào để tinh chỉnh bộ điều khiển. Nhằm đạt được kết quả và chất lượng điều khiển tốt nhất chứ không nhất thiết phải khô cứng tuân theo biểu thức (*). Tuy nhiên, tín hiệu ngõ vào e sau khi đi qua khâu khuếch đại GE phải có biên độ nằm trong giới hạn của bộ điều khiển.
Cải thiện bộ điều khiển mờ SISO
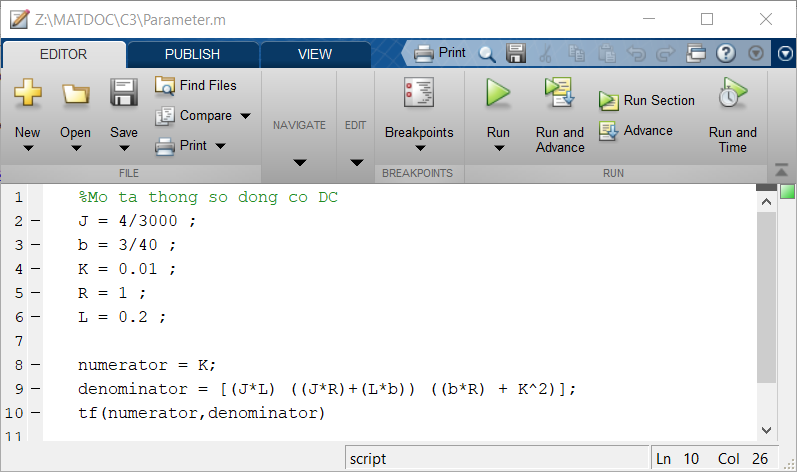
Từ Chapter L, ta đã thiết kế được bộ điều khiển mờ SISO cho mô hình động cơ DC. Ở Chapter này ta sẽ tiến hành thay đổi thông số mô hình động cơ để thấy được sự khác nhau sau khi cải thiện đáp ứng ngõ ra của bộ điều khiển. Ta sẽ thay đổi thông số mô hình như sau:



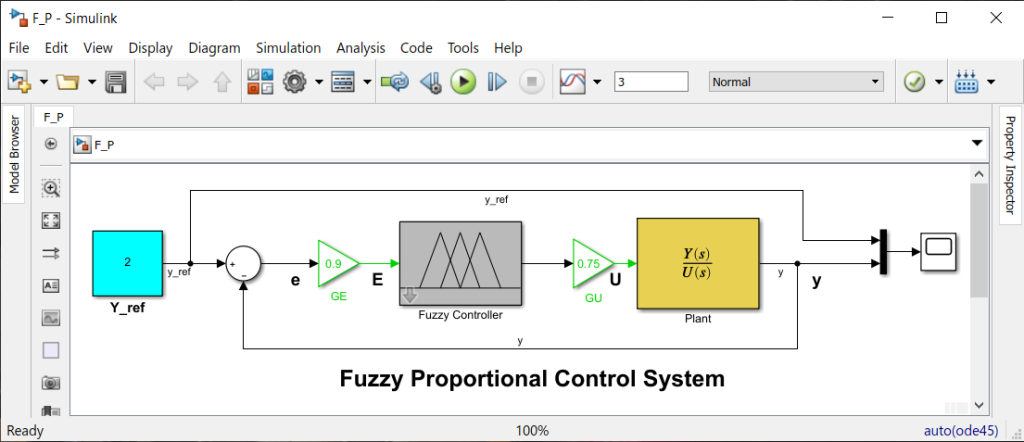
Như vậy, ta dễ thấy khi thông số mô hình thay đổi thì đáp ứng của ngõ ra sẽ không như mong muốn. Thay vì thiết kế lại bộ điều khiển, ta sẽ sử dụng mô hình như sau để tiến hành cải thiện bộ điều khiển SISO trên bằng cách tiến hành thêm hai khâu khuếch đại GE = 0.9 và GU = 0.75:
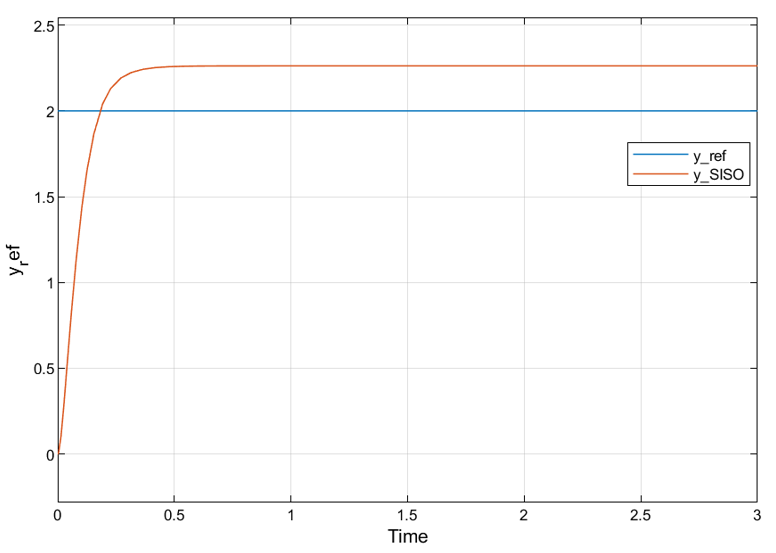
Sau khi tiến hành chạy mô phỏng, ta sẽ thu được đáp ứng ngõ ra như sau:

So sánh đáp ứng thu được:
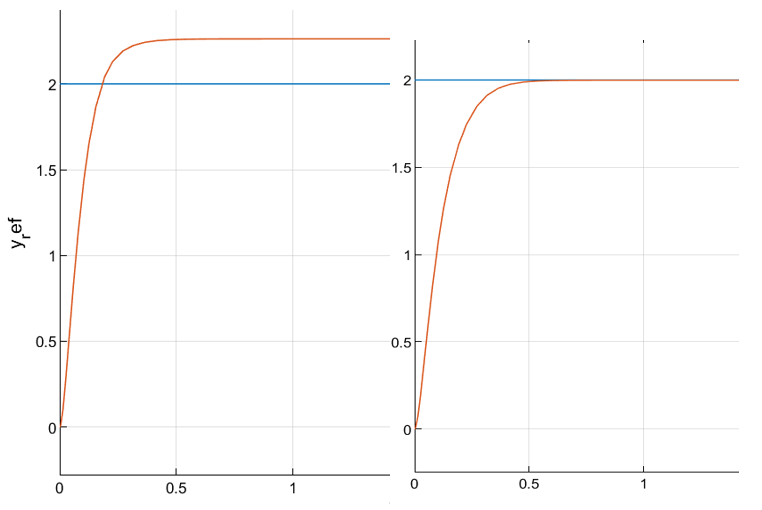
Ta thấy bộ điều khiển tỷ lệ mờ FP được thực hiện từ việc cải tiến bộ điều khiển mờ SISO cơ bản đã cho kết quả điều khiển tốt hơn, cụ thể là rút ngắn thời gian tăng (rise time) và giảm được vọt lố của hệ thống.
Tuy nhiên, hạn chế của kỹ thuật cải tiến này là không thể triệt tiêu được độ vọt lố (overshoot) của đáp ứng. Trong chừng mực nào đó, nếu đáp ứng thỏa tiêu chuẩn 2% hay 5% vọt lỗ thì bộ điều khiển có thể chấp nhận được. Ngược lại, nếu yêu cầu chất lượng khắt khe hơn, thì kỹ thuật cải tiến dạng điều khiển mờ tỷ lệ khó có thể thỏa mãn, khi đó, đòi hỏi phải tiến hành kỹ thuật hiệu chỉnh khác.
Cuối cùng, khi bộ điều khiển mờ SISO cơ bản đã cho đáp ứng khá tốt thì việc cải thiện đôi lúc sẽ không có hiệu quả, thậm chí sẽ làm cho bộ điều khiển hoạt động tệ hơn. Như trường hợp trên nếu ta chọn GU>1 thì sẽ xuất hiện sai số. Do vậy không phải lúc nào cải thiện bộ điều khiển mờ cũng cho kết quả như mong muốn.
