Cải thiện bộ điều khiển mờ
Qúa trình thiết kế hệ thống điều khiển mờ không nhất thiết phải biết trước mô hình toán mà chủ yếu dựa vào đáp ứng động học thông qua các biến vào của đối tượng. Các biến này sẽ được đặc ta bằng các biến ngôn ngữ và bộ luật điều khiển thích hợp được xây dựng dựa trên các biến ngôn ngữ này. Trong nhiều trường hợp khả năng nhận dạng mô hình của đối tượng là rất khó khăn, đôi khi không thể thực hiện được. Vì thế, việc áp dụng kỹ thuật điều khiển mờ là một trong những lựa chọn khả dĩ.
Tuy nhiên, ở một số trường hợp, bộ điều khiển mờ cơ bản khó có thể triệt tiêu sai số xác lập của đáp ứng. Ngoài ra, khi tham số của đối tượng điều khiển thay đổi nhẹ, bộ điều khiển mờ cơ bản có thể không còn đáp ứng được yêu cầu, đòi hỏi phải tiến hành hiệu chỉnh lại thiết kế. Để khắc phục các hạn chế này, một số kỹ thuật cải thiện chất lượng bộ điều khiển mờ đã được nghiên cứu và đề xuất. Các kỹ thuật này đã được phát triển khá xa, chẳng hạn dùng các giải thuật tối ưu để hiệu chỉnh các tập mờ ở khâu mờ hóa hay tự động điều chính bộ luật điều khiển…
Trong Chapter này, chúng ta không đi vào các kỹ thuật cải thiện phức tạp mà chỉ tập trung vào một số kỹ thuật đơn giản, chỉ cho phép hiệu chỉnh với tầm hoạt động thay đổi tương đối hẹp. Do vậy giải pháp thuận lớn nhất là giữ nguyên bộ điều khiển mờ cơ bản đã thiết kế và chỉ tăng cường các thành phần cần thiết bên ngoài bộ điều khiển. Đó là lý do mà Bộ Điều khiển Mờ Động xuất hiện.
Bộ điều khiển mờ động
Trước khi tìm hiểu, ta sẽ nhắc lại một số kiến thức về bộ điều khiển PID, do các khâu trong bộ điều khiển mờ động sẽ được cập nhật từ các thông số KP, KI, KD :


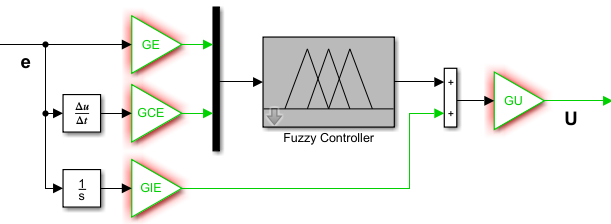
Bộ Điều khiển mờ động là bộ điều khiển mờ được xây dựng nên từ các bộ điều khiển mờ cơ bản mà đầu vào có sự tham gia của các trạng thái động của đối tượng như vận tốc, gia tốc, dạo hàm của gia tốc… Ví dụ đối với hệ điều khiển theo sai lệch thì đầu vào của bộ điều khiển mờ ngoài tín hiệu sai lệch e theo thời gian còn có các đạo hàm của sai lệch giúp cho bộ điều khiển phản ứng kịp thời với các biến động đột xuất của đối tượng.
Các bộ điều khiển thường được sử dụng hiện bao gồm:
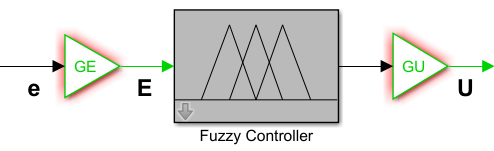
+ Điều khiển tỷ lệ mờ – Fuzzy Proportional controller (FP).
+ Điều khiển vi phân tỷ lệ mờ – Fuzzy Proportional Derivative controller (FPD).

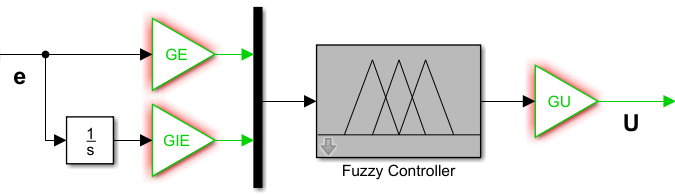
+ Điều khiển tích phân tỷ lệ mờ – Fuzzy Proportional Integral controller (FPI).
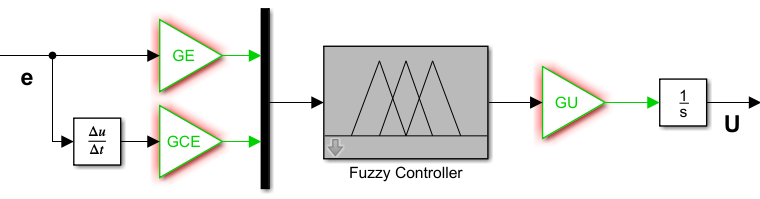
+ Điều khiển mờ tăng cường – Fuzzy Incremental Controller (FInc).
+ Điều khiển vi phân tỷ lệ mờ + tích phân – Fuzzy Proportional Derivative plus Integral (FPD+I).
Đánh giá
Ưu điểm của các kỹ thuật này là không can thiệp vào việc hiệu chính lại thiết kế bộ điều khiển mờ cơ bản, mà chỉ tăng cường các khẩu cần thiết bên ngoài. Tuy nhiên, hạn chế của các kỹ thuật này là tầm điều chỉnh không lớn. Thực tế cho thấy, trong nhiều trường hợp cần phải thiết kế lại bộ điều khiển mở cơ bản mới có thể đạt được chất lượng điều khiển như mong muốn.
Tuy nhiên mỗi kỹ thuật điều khiển đều có các ưu và nhược điểm riêng được tổng hợp như sau:
| Tên bộ điều khiển | Ký hiệu | Ưu điểm | Nhược điểm |
| Tỷ lệ mờ | FP | Thiết kế đơn giản. | Khó khắc phục được vọt lố và sai số xác lập. |
| Vi phân mờ | FPD | Ít xảy ra vọt lố. | Dễ bị nhiễu và lỗi do gai đạo hàm*. |
| Tích phân mờ | FPI | Triệt tiêu được sai số xác lập. | Khó khắc phục được vọt lố, dẽ bị bảo hòa tích phân**. |
| Mờ tăng cường | FInc | Triệt tiêu được sai số xác lập. | Đáp ứng khá chậm. |
| Vi phân mờ + Tích phân | FPD+I | Tất cả các ưu điểm trên. | Dễ bị bảo hòa tích phân và lỗi do gai đạo hàm. |
*Derivative kick: Khi sai biệt e thay đổi đột ngột, đạo hàm de phát sinh gai hẹp, biên độ lớn, dễ gây lỗi cho bộ điều khiển.
**Windup: Khi sai biệt e = 0, ngõ ra u của bộ điều khiển vẫn tiếp tục tăng do sự tích lũy của các thành phần tích phân, dẫn đến đáp ứng sai.
Tùy theo yêu cầu cụ thể của từng hệ thống mà người thiết kế có thể lựa chọn các phương thức trên để cải thiện bộ điều khiển mờ một cách phù hợp và hiệu quả. Ở các Chapter tiếp theo chúng ta sẽ đi vào chi tiết cách sử dụng và thông số của từng kỹ thuật điều khiển trên.
