Những phương thức điều khiển chính
Mọi hệ thống điều khiển phải đảm bảo trước hết độ ổn định của trạng thái vòng kín. Trong các hệ thống tuyến tính, điều này có thể đạt được bằng cách thay thế trực tiếp các cực. Các hệ điều khiển phi tuyến sử dụng các lý thuyết đặc biệt (thường dựa trên học thuyết của Aleksandr Lyapunov) để đảm bảo độ ổn định mà không cần phải quan tâm đến các quá trình động học bên trong hệ thống. Khả năng đáp ứng các biến đổi chức năng khác nhau từ việc nhận dạng mô hình và việc chọn phương thức điều khiển. Sau đây là danh sách giản lược của các kỹ thuật điều khiển chính:
Điều khiển thích nghi – Adaptive control
Điều khiển thích nghi sử dụng sự nhận dạng trực tuyến các thông số của quá trình, hoặc sự điều chỉnh của độ lợi bộ điều khiển, do đó đạt được đặc tính bền vững mạnh mẽ. Điều khiển thích nghi đã được ứng dụng lần đầu trong công nghiệp không gian vào những năm 1950, và làm nên sự thành công trong lĩnh vực này.

Điều khiển phân cấp – Decentralized control
Hệ thống điều khiển phân cấp là một dạng của hệ thống điều khiển trong đó một bộ thiết bị và phần mềm điều khiển được sắp xếp trong một dạng có thức bậc cây. Khi các liên kết của cây được thực thi bởi một mạng máy tính, do đó hệ thống điều khiển phân cấp cũng là một dạng của Hệ thống điều khiển mạng lưới.

Điều khiển thông minh – Smart control
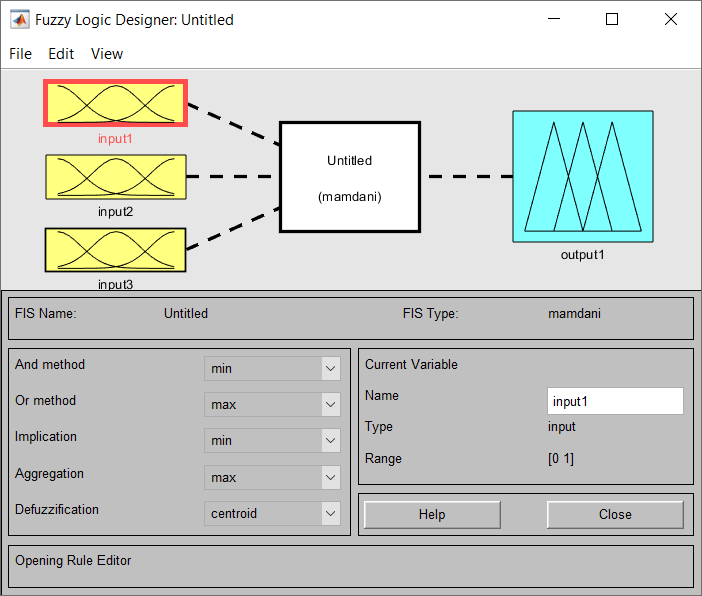
Điều khiển thông minh sử dụng nhiều cách tiếp cận tính toán thông minh nhân tạo (AI-Artificial Intelligent) khác nhau như mạng nơ ron, Xác suất Bayesian, logic mờ, máy học, lập trình tiến hóa và giải thuật di truyền để điều khiển một hệ thống động lực.
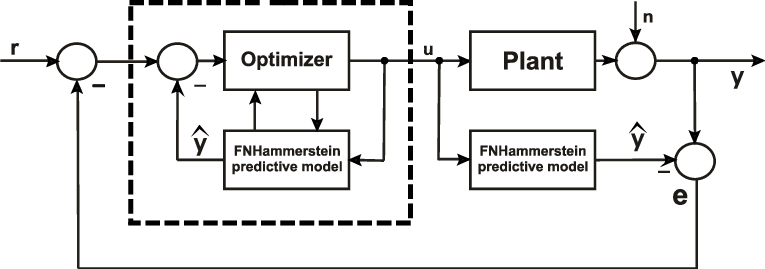
Điều khiển tối ưu – Optimal control
Điều khiển tối ưu là một phần của kỹ thuật điều khiển trong đó tín hiệu điều khiển tối ưu hóa “chỉ tiêu giá thành” biết trước: ví dụ, trong trường hợp một vệ tinh, lực đẩy phản lực cần thiết để mang nó lên quỹ đạo mong muốn phải đốt cháy một lượng nhiên liệu nào đó. Hai phương pháp để thiết kế điều khiển tối ưu đã được sử dụng rộng rãi trong các ứng dụng công nghiệp, vì khả năng đảm bảo độ ổn định của vòng kín. Đó là Điều khiển dự đoán mô hình (MPC-Model Predictive Control) và điều khiển tuyến tính bậc hai Gauss (LQG-Linear-Quadratic-Gaussian control). Cái đầu tiên có thể xét đến rõ ràng hơn các ràng buộc trên tín hiệu hệ thống, là một điểm quan trọng trong nhiều chu trình công nghiệp. Tuy nhiên, cấu trúc “điều khiển tối ưu” trong MPC chỉ có nghĩa khi đạt được kết quả, vì nó không tối ưu một chỉ số biểu diễn chính xác của hệ điều khiển vòng kín. Cùng với các bộ điều khiển PID, hệ thống MPC cũng được sử dụng phổ biến trong điều khiển quá trình.
Điều khiển bền vững – Sustainable control
Điều khiển bền vững dùng để loại bỏ độ bất định mà nó tiếp cận để thiết kế bộ điều khiển. Các bộ điều khiển được thiết kế sử dụng các công cụ của điều khiển bền vững có xu hướng có thể giải quyết các khác biệt nhỏ giữa hệ thống thực và mô hình toán học dùng cho thiết kế. Các công cụ đầu tiên của Bode và những người khác đã khá ổn định; các phương pháp không gian trạng thái được phát minh vào những năm 1960 và 1970 đôi khi không có sự ổn định. Một thí dụ hiện đại của kỹ thuật điều khiển bền vững là tạo dáng vòng lặp H-vô tận được phát triển bởi Duncan McFarlane và Keith Glover thuộc đại học Cambridge, Anh. Các phương pháp ổn định dùng để đạt được kết quả bền vững và/hoặc độ ổn định với sự có mặt của sai số mô hình hóa nhỏ.

Điều khiển ngẫu nhiên
Điều khiển ngẫu nhiên giúp thiết kế điều khiển với độ bất định trong mô hình. Đặc thù trong khó khăn đối với điều khiển ngẫu nhiên, là nó cho rằng tồn tại nhiễu ngẫu nhiên trong mô hình và bộ điều khiển, thiết kế điều khiển phải đem những vi phân ngẫu nhiên này vào tính toán.
Những phương thức điều khiển trên chỉ được trình bày ở mức giới thiệu. Do vậy, trong tất cả những cách thức điều khiển trên chúng ta sẽ tìm hiểu sâu một số hệ thống mà chúng ta có thể tiếp cận cũng như xây dựng mô hình ứng dụng. Tất cả sẽ được cập nhật ở các Chapter kế tiếp.