Trước khi đề cập đến hệ thống điều khiển và các chương sau, chúng ta phải nắm được một số thuật ngữ cơ bản cần được định nghĩa trước như sau:
Biến điều khiển hay biến quy trình (Process Variable – PV) – Tín hiệu điều khiển: Biến điều khiển là lượng hoặc điều kiện được đo và được điều khiển. Tín hiệu điều khiển là lượng hoặc điều kiện bị tác động bởi bộ điều khiển và làm ảnh hưởng đến biến điều khiển. Thông thường biến điều khiển là ngõ ra của hệ thống. Điều khiển nghĩa là do giá trị biến điều khiển của đối tượng và xuất ra tín hiệu điều khiển đội với hệ thống nhằm sửa sai hoặc hạn chế sai lệch giữa giá trị do được và giá trị mong muốn.
Đối tượng: Đối tượng có thể là một phần của thiết bị, cũng có thể là gồm một phần của hệ thống có chức năng thực hiện một hoạt động cụ thể. Các hệ thống hay chủ thể vật lý như thiết bị cơ khí, lò nhiệt, lò phản ứng hóa học hoặc tàu vũ trụ được xem như là đối tượng.
Quá trình là một hoạt động diễn tiến liên tục trong tự nhiên được đánh dấu bằng một chuỗi thay đổi và hướng tới một kết quả cụ thể hay kết thúc quá trình. Các quá trình như quá trình phản ứng hóa học, quá trình sinh học hay quá trình sản xuất.
Hệ thống là sự kết nối của các bộ phận tương tác lẫn nhau và thực hiện một mục tiêu xác định như hệ thống điều khiển nhiệt độ, độ ẩm trong phòng. Hệ thống không đồng nhất với hệ thống vật lý và đó là một khái niệm trừu tượng.
Nhiễu là một tín hiệu làm ảnh hưởng đến giá trị ngõ ra của hệ thống. Nếu nhiễu được phát ra từ hệ thống được gọi là nhiều nội. Ngược lại, nếu nhiều từ bên ngoài và thâm nhập vào hệ thống thì được gọi là nhiều ngoài, nó được xem như một ngõ vào.
Điều khiển hồi tiếp (Feedback Control) là một hoạt động có sự hiện diện của nhiều với mục tiêu làm giảm sự sai biệt giữa giá trị thực tế PV và giá trị mong muốn SP của hệ thống. Nếu biết trước được nhiễu can thiệp vào hệ thống thì trong hệ thống sẽ có một hoặc nhiều thành phần để bù.
Điều khiển (Control) là quá trình thu thập thông tin, xử lý thông tin và tác động lên hệ thống để đáp ứng của hệ thống gần với mục đích định trước hay làm cho sai biệt giữa giá trị thực và giá trị mong muốn là nhỏ nhất. Điều khiển tự động là quá trình điều khiển không có sự can thiệp của con người.
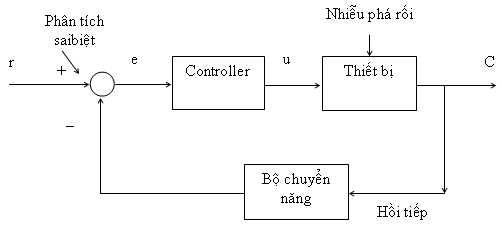
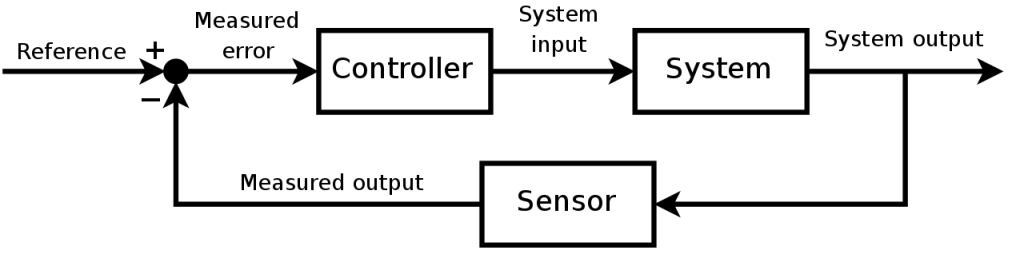
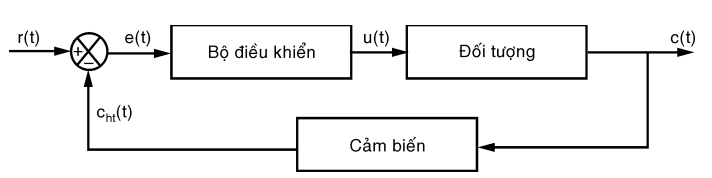
Một hệ thống điều khiển thông thường có dạng như hình trên. Trong đó r (Feference hay Set Point SP) là tín hiệu tham chiếu hay tín hiệu tham khảo hay tín hiệu đặt hay tín hiệu chuẩn hay tín hiệu mong muốn (tuy nhiên trong các Chapter sau này được sử dụng là Set Point – SP), u là tín hiệu điều khiển, nhiễu là tín hiệu nhiễu, C là tín hiệu ngõ ra (trong các Chapter sau sẽ được gọi là Process Variable – PV), tín hiệu hồi tiếp thông qua Bộ chuyển năng thường là các cảm biến và e tức error (SP-PV) là sai số giữa tín hiệu ngõ ra thực tế và tin hiệu mong muốn.
Đây là những thứ cơ bản nhất và rất quan trong trọng trong quá trình học tập và nghiên cứu về các hệ thống điều khiển. Do vậy trước khi tìm hiểu các Chapter kế tiếp chúng phải làm quen với những định nghĩa này.