Phân tích hệ thống
Các kỹ thuật toán học để phân tích và thiết kế hệ thống điều khiển được chia thành hai loại khác nhau:
Phân tích theo Miền tần số (Frequency Domain) – Được sử dụng trong Lý thuyết điều khiển cổ điển. Trong loại này, giá trị của các biến trạng thái, các biến toán học đại diện cho đầu vào, đầu ra và phản hồi của hệ thống được biểu diễn dưới dạng các hàm của tần số. Tín hiệu đầu vào và hàm truyền của hệ thống được chuyển đổi từ hàm thời gian sang hàm tần số bằng một phép biến đổi như biến đổi Fourier, Laplace hoặc biến đổi Z. Ưu điểm của kỹ thuật này là việc đơn giản hóa toán học; các phương trình vi phân đại diện cho hệ thống được thay thế bằng các phương trình đại số trong miền tần số dễ giải quyết hơn. Tuy nhiên, kỹ thuật phân tích miền tần số chỉ có thể được sử dụng với các hệ thống tuyến tính, như đã đề cập ở Chapter C.


Biểu diễn không gian trạng thái trong Miền thời gian (Time-domain state space representation) – Được sử dụng trong Lý thuyết điều khiển hiện đại. Trong kiểu này, giá trị của các biến trạng thái được biểu diễn dưới dạng các hàm của thời gian. Với mô hình này, hệ thống đang được phân tích sẽ được biểu diễn bằng một hoặc nhiều phương trình vi phân. Vì các kỹ thuật miền tần số được giới hạn trong các hệ thống tuyến tính, miền thời gian được sử dụng rộng rãi để phân tích các hệ thống phi tuyến trong thế giới thực. Mặc dù những điều này khó giải quyết hơn, nhưng các kỹ thuật mô phỏng máy tính hiện đại như các ngôn ngữ mô phỏng mạnh mẽ nhất có thể nói đó là Matlab – Simulink. Thì việc biểu diễn hệ thống theo miền thời gian sẽ dễ dàng hơn rất nhiều.
Giao diện hệ thống
Hệ thống điều khiển có thể được chia thành nhiều loại khác nhau tùy thuộc vào số lượng đầu vào và đầu ra như sau:
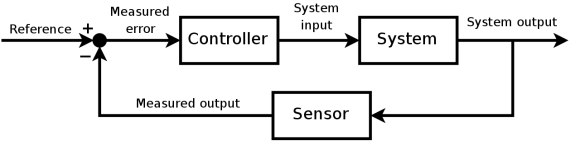
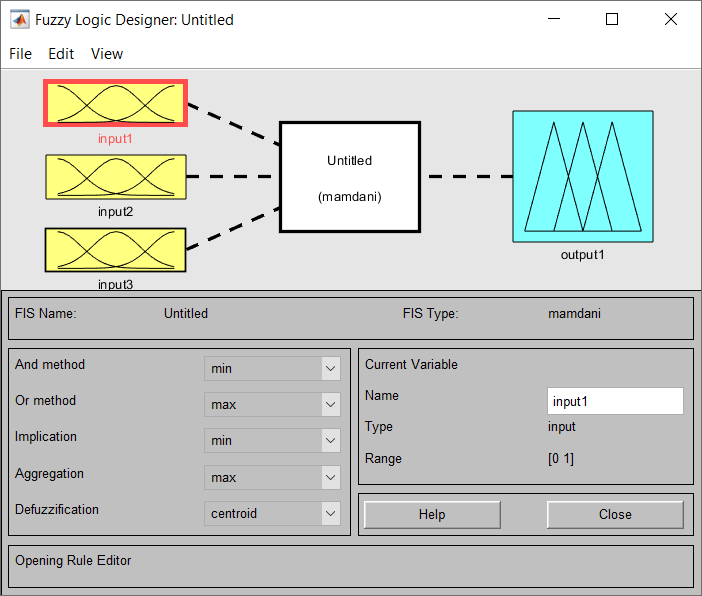
SISO (Single Input Single Output) với một đầu ra và một đầu vào – Đây là loại đơn giản nhất và phổ biến nhất, trong đó một đầu ra được điều khiển bởi một tín hiệu điều khiển. Bên cạnh đó còn có hệ thống MISO (Multiple Input Single Output) thường được sử dụng trong Fuzzy Cotroller (Tham khảo thêm tại đây). Ví dụ như ví dụ về điều khiển tốc độ động cơ DC, ứng với một giá trị ngõ vào là điện áp cấp cho động cơ. Ta sẽ thu được một giá trị ngõ ra là tốc độ quay của động cơ.
MIMO (Multiple Input Multiple Output) với nhiều ngõ vào và nhiều ngõ ra – Chúng được sử dụng trong các hệ thống phức tạp hơn. Ví dụ, các kính thiên văn lớn hiện đại như Keck và MMT có các gương bao gồm nhiều phân đoạn riêng biệt, mỗi kính được điều khiển bởi một cơ cấu truyền động. Hình dạng của toàn bộ gương là được điều chỉnh liên tục bởi hệ thống điều khiển quang học hoạt động MIMO sử dụng đầu vào từ nhiều các cảm biến tại mặt phẳng tiêu điểm, để bù cho những thay đổi trong hình dạng gương do giãn nở nhiệt, co lại, ứng suất khi nó quay và sự biến dạng của mặt sóng do nhiễu loạn trong khí quyển. Các hệ thống phức tạp như lò phản ứng hạt nhân và bộ não con người có các tế bào thần được ví như các hệ thống điều khiển MIMO lớn.

