Linear – Nonlinear Control Theory
Lĩnh vực lý thuyết điều khiển có thể được chia thành hai nhánh:
Linear Control Theory – Lý thuyết điều khiển tuyến tính áp dụng cho các hệ thống được làm bằng các thiết bị tuân theo nguyên tắc chồng chất, có nghĩa là đầu ra tỷ lệ thuận với đầu vào. Chúng bị chi phối bởi các phương trình vi phân tuyến tính. Một phân lớp chính là các hệ thống ngoài ra còn có các tham số không thay đổi theo thời gian, được gọi là hệ thống bất biến thời gian tuyến tính (LTI). Các hệ thống này có thể chấp nhận các kỹ thuật toán học miền tần số mạnh mẽ có tính tổng quát tuyệt vời, chẳng hạn như biến đổi Laplace, biến đổi Fourier, biến đổi Z, giản đồ Bode, tiêu chí ổn định Nyquist. Những điều này dẫn đến mô tả hệ thống bằng cách sử dụng các thuật ngữ như băng thông, phản hồi tần số, cộng hưởng, khuyếch đạo, tần số cộng hưởng, số Zero và cực, cung cấp các giải pháp cho các kỹ thuật thiết kế và phản hồi hệ thống cho hầu hết các hệ thống.
Nonlinear Control Theory – Lý thuyết điều khiển phi tuyến bao gồm một lớp rộng hơn của các hệ thống không tuân theo nguyên tắc chồng chất, và áp dụng cho các hệ thống thực tế hơn. Các hệ thống này thường bị chi phối bởi các phương trình vi phân phi tuyến. Một vài kỹ thuật toán học đã được phát triển để xử lý chúng ít khó khăn hơn và ít chung chung hơn, nhưng thường chỉ áp dụng cho một số ít hệ thống. Chúng bao gồm lý thuyết chu kỳ giới hạn, bản đồ Poincaré, định lý ổn định Lyapunov và mô tả các chức năng. Các hệ thống phi tuyến thường được phân tích bằng các phương pháp số trên máy tính, ví dụ bằng cách mô phỏng hoạt động của chúng bằng ngôn ngữ mô phỏng như trong Matlab – Simulink. Nếu chỉ có các giải pháp gần một điểm ổn định được quan tâm, các hệ thống phi tuyến thường có thể được tuyến tính hóa bằng cách xấp xỉ chúng bằng một hệ thống tuyến tính bằng cách sử dụng lý thuyết nhiễu loạn và các kỹ thuật tuyến tính có thể được sử dụng.
Phân loại yêu cầu
Có ba dạng bài toán cơ bản trong lý thuyết điều khiển:
+ Phân tích hệ thống
+ Thiết kế hệ thống
+ Nhận dạng hệ thống
Phân tích hệ thống: Đối với dạng bài toán này thường yêu cầu tìm đáp ứng ngõ ra và đánh giá chất lượng của hệ thống dựa trên thông số và cấu trúc của đối tượng đã biết.
Thiết kế hệ thống: Đối với dạng bài toán này thường yêu cầu thiết kế bộ điều khiển thỏa mãn yêu cầu về chất lượng dựa trên cấu trúc và thông số của đối tượng đã biết.
Nhận dạng hệ thống: đối với bài toán dạng này hoàn toàn chưa biết trước cấu trúc và thông số của đối tượng. Do đó bài toán sẽ yêu cầu tìm cấu trúc và thông số của đối tượng.
Bài toán phân tích hệ thống và thiết kế hệ thống luôn luôn thực hiện được trong khi bài toán nhận dạng hệ thống không phải lúc nào cũng thực hiện được.
Trong lý thuyết điều khiển tự động, người ta thường phân ra làm nhiều loại hệ thống khác nhau như: hệ thống liên tục (được mô tả bằng phương trình vi phân), hệ thống rời rạc (được mô tả bằng phương trình sai phân), hệ thống tuyến tính (được mô tả dưới dạng phương trình vi phân/sai phân tuyến tính), hệ thống phi tuyến (được mô tả dưới dạng phương trình vi phân/sai phân phi tuyến), hệ thống bất biến theo thời gian (các hệ số của phương trình vi phân sai phân không thay đổi theo thời gian), hệ thống thay đổi theo thời gian (các hệ số của phương trình vi phân/sai phân thay đổi theo thời gian).
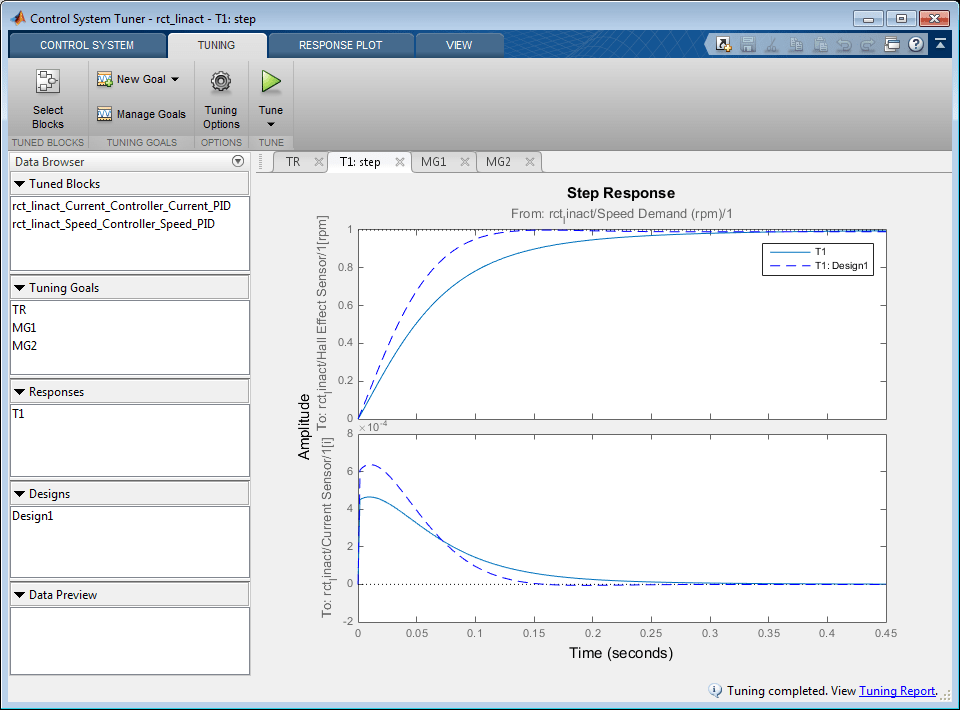
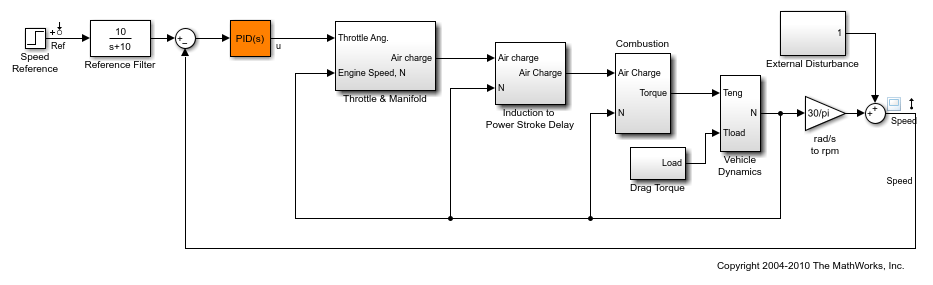
Các hệ thống trên có thể được phân tích, thiết kế và xây dựng mô hình trên MATLAB – Simulink. Đây là một công cụ rất mạnh, hữu ích và có tính ứng dụng cao. Chi tiết cách thiết kế và xây dựng cùng từng loại hệ thống điều khiển sẽ được đề cập trong các Chapter khác. Sẽ giúp chúng ta có cái nhìn cụ thể hơn về hệ thống điều khiển.
