Lý thuyết điều khiển là gì ?
Lý thuyết điều khiển hay lý thuyết điều khiển tự động là một nhánh liên ngành của kỹ thuật và toán học. Nó liên quan trực tiếp đến việc kiểm soát các hệ thống động lực học trong các quy trình và máy móc được thiết kế. Mục tiêu là phát triển một mô hình hoặc thuật toán điều chỉnh đầu vào hệ thống để đưa hệ thống đến “gần” trạng thái hay ngõ ra mong muốn. Đồng thời giảm thiểu tối đa độ trễ, độ vọt lố hoặc trạng thái không ổn định của hệ thống. Việc xây dựng và thiết kế phải đảm bảo hệ thống được kiểm soát với độ ổn định và độ tối ưu cao nhất.
Để làm được điều này, một bộ điều khiển được sử dụng để sửa chữa hay tinh chỉnh là cần thiết. Bộ điều khiển này sẽ giám sát giá trị Process Variable (PV) hay biến quy trình tức giá trị đầu ra thực tế của hệ thống. Sau đó, so sánh nó với điểm tham chiếu hoặc điểm đặt (Set Point – SP) tức đầu ra mong muốn của một hệ thống. Sự khác biệt giữa giá trị thực tế và giá trị mong muốn được gọi là tín hiệu lỗi hoặc sai số error SP-PV, được áp dụng làm phản hồi để tạo ra một hành động điều khiển để đưa PV được điều khiển đến cùng giá trị với SP. Toàn bộ quá trình này được gọi là Hệ thống điều khiển.
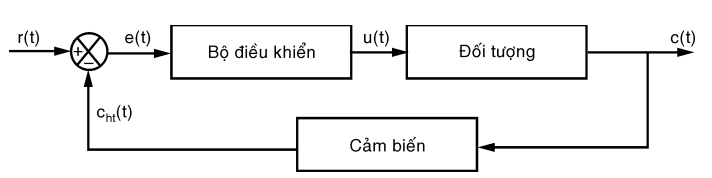
Hệ thống điều khiển bao gồm các thành phần sau:
- r(t) (Set Point): Giá trị đặt hay giá trị mong muốn.
- c(t) (Process Variable): Giá trị thực tế.
- cht(t): Tín hiệu hồi tiếp
- e(t) (Error SP-PV): Sai số giữa giá trị mong muốn và giá trị thực tế.
- u(t): Tín hiệu điều khiển.
Để thực hiện được quá trình điều khiển như trên, một hệ thống điều khiển bắt buộc gồm có ba thành phần cơ bản là thiết bị đo lường (cảm biến), bộ điều khiển và đối tượng điều khiển. Thiết bị đo lường có chức năng thu thập thông tin, bộ điều khiển thực hiện chức năng xử lý thông tin, ra quyết định điều khiển và đối tượng điều khiển chịu sự tác động của tín hiệu điều khiển. Hệ thống điều khiển trong thực tế rất đa dạng, sơ đồ khối ở hình trên là cấu hình của hệ thống điều khiển thường gặp nhất.
Đây là cơ sở cho các quy trình tự động hóa tiên tiến đã cách mạng hóa sản xuất, máy bay, truyền thông và các ngành công nghiệp khác. Hệ thống điều khiển trên được gọi là “Feedback Control”, liên quan đến việc thực hiện các phép đo bằng cách sử dụng cảm biến và thực hiện các điều chỉnh được tính toán để giữ cho Process Variable – PV nằm trong phạm vi thiết lập bằng phần tử điều khiển cuối cùng hay “Final control element”, chẳng hạn như van điều khiển.
Chạy xe máy là ví dụ dễ hiểu nhất. Bạn muốn điều khiển xe máy chạy với vận tốc 50 km/h, khi đó bạn sẽ lên hoặc xuống tay ga để xe đi nhanh hơn hoặc chậm hơn tùy thuộc vào tốc độ hiện tại. Đôi mắt sẽ quan sát đồng hồ tốc độ của xe để xác định sự chênh lệch giữa tốc độ hiện tại và tốc độ mong muốn. Não sẽ đưa ra hành động lên ga nếu tốc độ xe dưới 50 km/h và ngược lại nếu trên 50 km/h. Khi đó giá trị mong muốn hay Set Point là 50 km/h; giá trị thực tế hay Process Variable là tốc độ trên đồng hồ tốc độ của xe; cảm biến theo dõi tốc độ hiện tại là đôi mắt của chúng ta; đối tượng điều khiển chính là động cơ xe và cuối cùng bộ điều khiển chính là bộ não.
Hệ thống điều khiển được sử dụng rộng rãi thường được xây dựng bằng một kiểu sơ đồ được gọi là sơ đồ khối. Trong đó, hàm chuyển giao “Transfer Function”, còn được gọi là hàm hệ thống hoặc hàm mạng, là một mô hình toán học về mối quan hệ giữa đầu vào và đầu ra dựa trên các phương trình vi phân mô tả hệ thống.
Lý thuyết điều khiển đã có từ thế kỷ 19, khi cơ sở lý thuyết cho hoạt động của các bộ điều khiển lần đầu tiên được mô tả bởi James Clerk Maxwell. Lý thuyết điều khiển đã được Edward Routh tiến bộ hơn nữa vào năm 1874, Charles Sturm và năm 1895, Adolf Hurwitz, tất cả đều góp phần thiết lập các tiêu chuẩn ổn định cho hệ thống; và từ năm 1922 trở đi là sự phát triển của lý thuyết điều khiển PID của Nicolas Minorsky. Mặc dù ứng dụng chính của lý thuyết điều khiển toán học là trong kỹ thuật hệ thống điều khiển, liên quan đến việc thiết kế các hệ thống kiểm soát quy trình cho các ngành công nghiệp, nhưng ngày nay các ứng dụng khác vượt xa điều này như Robotics, IoT hay AIoT. Là lý thuyết chung về “Feedback Control”, lý thuyết điều khiển rất hữu ích ở bất cứ nơi nào có sự phản hồi (Feedback) – do đó lý thuyết điều khiển cũng có các ứng dụng trong khoa học đời sống, kỹ thuật máy tính, xã hội học và nghiên cứu vận hành.

One reply on “Lý thuyết điều khiển”
[…] Variable – PV bằng cách so sánh chúng và sử dụng sự sai số hay SP-PV (Xem Chapter A Introduction) này như một “điểm nhận biết” để điều khiển thì được gọi […]
LikeLike